My intention in writing this note is to understand the relation between conventional model of distributed systems that they usually teach in the distributed systems course and the the distributed web services hosting replicated datatypes. Fault tolerance is a concern in the former, and it is studied separately from communication link failures. On the other hand, partition tolerance is a concern in the later, and it looks like this means tolerance to communication failures. Consistency and availability are major concerns in distributed web services, whereas they don’t figure anywhere in the formal study of distributed systems. What is the connection? How can we express CAP theorem in conventional models?
The System Model
The conventional model of a distributed system is that of a replicated state machine (automaton), where the automaton models a local computation that reacts to external messages. This makes it clear that the focus in conventional model is on how to perform a replicated computation rather than on how to maintain replicated data.
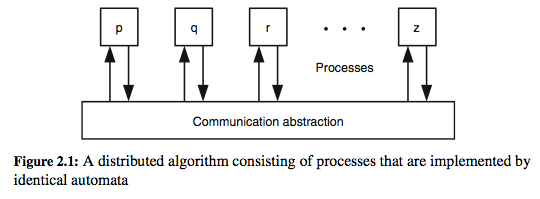
The above image is taken from Reliable Distributed Systems textbook.
This view is also corroborated by Eric Brewer in his PODC’2000 talk, where he conjectured CAP. Here are some exerpts from his (slides):
Inktomi builds distributed systems ... but very little use of classic DS research. "Distributed Systems" don't work Persistent state is hard. Classic DS focuses on computation, not data. This is WRONG; computation is the easy part.
The semantics of a distributed system that is intented to maintain replicated data is best captured in Burckhardt et al’s POPL’14 paper. Since we are familiar with the model, I am not going to reproduce it here.
Communication Links and Failures
In the conventional model, process is the unit of communication and the the unit of failure. It is assumed that there is a one-to-one communication link between every pair of processes in the system. Conventional model allows for processes to fail. The widely used model of process failure is crash-stop, where a process crashes and stops, and therefore becomes inaccessible. A communication link may also fail, but this failure shows up as a process failure - processes at both ends of a link preceive each other as failed processes. However, other processes may still view them as correct processes, and the conventional model allows for this disparity in processes’ view of what other processes have failed.
Replicated data stores are usually geo-distributed, so there do not exist one-to-one links between processes. Processes are organized into subnets, which are often connected through a single communication link. Therefore, in distributed web services model, a communication link is considered a unit of failure. Failure of a link can cause network to be paritioned into disconnected subnets, and web-services are often required to tolerate these partitions. For most purposes, a process failure can also be modeled as network partitioning by simply assuming that the failed process is in its own parition. In summary, in distributed webservices model, faults occur in communication links thereby leading to network partitions, and fault tolerance effectively means partition tolerance.
Timing Assumptions
Both conventional and current models of a distributed system are asynchronous models - they do not make any assumptions about time bounds on communication delays or (relative) process speeds. In both the models, we rely on logical clocks (eg: vector clocks) and causal ordering to understand the behaviour of the system with respect to passage of time.
Consistency & Availability
Ideally, a distributed web-service has to be consistent in the sense that it should behave the same as if it is operating on an atomic data object. Any operation performed on the data object should see the effects of all previous operations. For example, consider a web-service for a simple read/write register. The operations allowed are write and read, which write a value to the register and read the current value in the register, respectively. Let us assume that the client performs two successful writes of values 20 and 40 to the register. Then a subsequent read should return 40, failing which the system is deemed inconsistent. This kind of consistency guarantee is called strong consistency or sequential consistency. Under this consistency guarantee, there must exist a total order on all operations such that each operation looks as if it were completed at a single instance.
Along with being consistent, a distributed web-service needs to be available - every request made to the web-service should be met with a response, given that the web-service remains accessible on the network. To be available, no non-failing node in the distributed system implementing the web-service should wait infinitely for an event to occur before responding to a client request.
CAP theorem says that it is impossible to guarantee (strong) consistency and availability in a system that needs to be partition tolerant. First, let us see if this makes sense intuitively. Consider the read/write register web-service described previously. Assume that it is being implemented by a distributed system with two geo-distributed nodes, each holding a replica of the register. Consider a client which makes following requests to the web-service in the order shown:
1. write 20
2. write 40
3. read
The order is called session order. Let us tag each request with is
serial number in session order. Assume that write 20 goes to first
node, which immediately writes 20 to the local register and
simlutatenously forwards the request to second node. Now, should the
first node wait for the acknowledgement from second node before
responding to the client? Given that we are operating in an
asynchronous environment and there is no time bound on the delivery of
acknowledgement, the wait time for first node could potentially be
infinite. This leads to the violation of the availability guarantee.
Therefore, the node should respond immediately to the client, and use
timeouts and retransmissions to eventually propagate client request to
the second node.
Consider a scenario where second write request (write 40) also goes
to first node, but the read request goes to the second node. Assume
that by the time read request was made to second node, it already
received the write 20 request forwarded by the first node. Looking
at their serial numbers (1 for write 20 and 3 for read), the
second node knows that there is a request made by the client before
the read that it has not yet received. This missing request
could be a write (it is indeed a write in this case). Therefore,
if the node has to respond with a correct value for the read request
, it has to wait until it receives the missing request, in which case
it might have to wait infinitely as network may get partioned in
meantime. This violates availability. The other option is to respond
with the current value of the register without waiting for the second
request to be delivered. In this case, the client reads 20 instead of
the expected 40, which means that the system is no longer (strongly)
consistent. Therefore, it is impossible for our service to be both
available and consistent in presence of network partitions.
Consistency & Avalability in Conventional Model
The conventional model accounts for network partitioning through process failures - A faulty process that stops communicating with rest of the processes in the system effectively leads to network partitioning. Fault tolerance is the ability of a system to behave in well-defined manner once faults occur. There has been an extensive research on fault tolerance in conventional models, but does this research include a study of consistency and availability properties in presence of faults?
The answer is yes. They were studied under broad categories of safety and liveness properties, respectively. A safety property of a system is usually expressed as a set of legal system configurations, commonly referred to as an invariant. To be safe, a system has to always remain in the set of safe states as defined by the safety property. Consistency is a safety property as it restricts the set of observable states of the system. For the read/write register example, consistency dictates that the observable state of the register after the first two writes is the value 40. Any other state is inconsistent or unsafe.
On the other hand, a liveness property claims that some good thing will eventually happen during system execution. Liveness properties are eventuality properties - a traffic signal should eventually allow every car waiting at an intersection to pass through. Availability is a liveness property, as it requires every request to be eventually met with a response. In literature on fault tolerance, availability property is more commonly referred to as guaranteed service.
Recall that fault tolerance is the ability of a system to behave in well-defined manner once faults occur. In his landmark survey paper on fault tolerance in distributed systems, Gartner identifies four forms of fault tolerance based on which among safety (S) and liveness (L) properties hold when faults occur in the system. The four are listed below:
- Masking fault tolerance: when both S and L hold in presence of faults
- Fail-safe: when only S holds
- Non-masking: when only L holds
- None (or fault intolerant): when none of them hold.
Gartner’s paper was published in 1999, before CAP was conjectured, and before eventually consistent data stores proliferated. The paper reflects the kind of applications that researchers had in mind when studying distributed systems. These applications are quite different from replicated data stores, which explains the disparity between conventional models and current systems. Below, I reproduce some of the relevant verbatim from the paper, which is suggestive of this gulf:
fail-safe fault tolerance and is preferable to non-masking whenever safety is much more important than liveness. An example is the ground control system of the Ariane 5 space missile project [Dega 1996]. The system was masking fault tolerance for a single component failure, but was also designed to stop in a safe state whenever two successive component failures occurred [Dega 1996]. For the latter type of faults, the launch of the missile (liveness) was less important than the protection of its pre- cious cargo and launch site (safety). .... In effect (of non-masking fault tolerance), the user may experience a certain amount of incorrect system behavior (i.e., failures). For example, a calculation result will be wrong or a replication variable may not be up to date .... Research has traditionally focused on forms of fault tolerance that continuously ensure safety. This can be attributed to the fact that in most fault-tolerance applications, safety is much more important than liveness. ... For a long time nonmasking fault tolerance has been the “ugly duckling” in the field, as application scenarios for this type of fault tolerance are not readily visible. However, the potential of non-masking fault tolerance lies in the fact that it is strictly weaker than masking fault tolerance, and can therefore be used in cases where masking fault tolerance is too costly to implement or even provably impossible. ... (Talking about self-stabilizing programs, which are pre-cursors of eventually consistent programs) Examples show that such programs are quite difficult to construct and verify [Theel and Gärtner 1998]. Also, their nonmasking nature has inhibited them from yet becoming practically relevant. ...
In summary, the paper says that masking fault tolerance, where both safety and liveness is preserved in presence of faults is “strictest and most costly” form of fault tolerance, and that ensuring such tolerence is a “major area of research”. Instead, fail-safe fault tolerance is preferable for most practical applications.
The CAP Theorem
Now that we are aware of Gartner’s categorization of fault tolerance, we can state the CAP theorem simply as:
It is impossible to have masking fault tolerance in an unreliable
distributed system
In the words of Gilbert and Lynch, who gave the first the proof of the theorem:
The CAP Theorem, in this light, is simply one example of the
fundamental fact that you cannot achieve both safety
and liveness in an unreliable distributed system
- From "Perspectives on the CAP Theorem"
It should therefore be noted that oft reproduced formulation of the CAP theorem as “pick any two among Consistency, Availability and Partition Tolerance” is misleading at best. A better formulation is:
A distributed system that is network partition tolerant cannot be
consistent and available at the same time.
So, it is more about picking one among the two rather than picking two among the three.
Eventual Consistency & Its Impact on Availability
Bailis et al’s paper on Highly Available Transactions: Virtues and Limitations, classifies operations on a replicated data store as unavailable, sticky-available and available. An operation, such as a write on read/write register, that has no requirements on consistency is classified as available. This is expected, as write can be applied to any replica without any need to wait for an event, and the client can be informed of success/failure of write